|
|
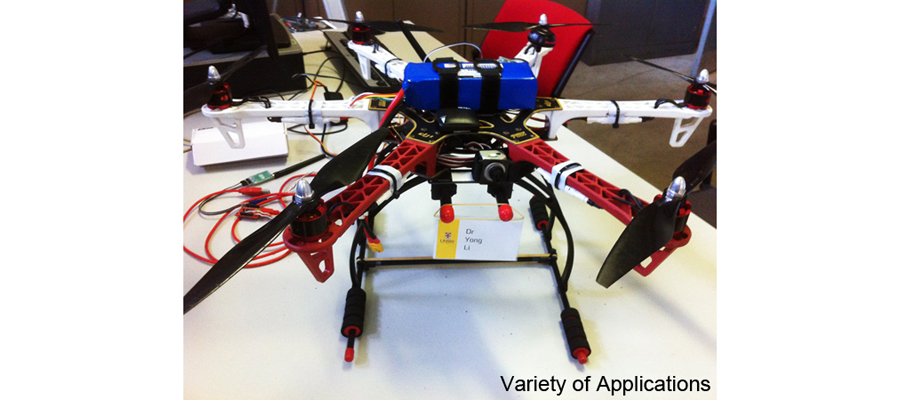
msRTK Multi Sensor Real Time Kinematics is a new research team that are made up of multidisciplinary engineering students, led by Dr. Yong Li. Our team focuses on developing low-cost, high accuracy GPS systems with an easy to use interface that is useful for a variety of applications. The aim of this research group is to finish the development of NAVCON, a low-cost navigation and control board, and produce a new UAV platform that can be useful for a variety of tasks; ranging from aerial surveillance, homeland security and positioning operations. |
|
Home |
NAVCON |
Resources |
About us |
Join us |
Copyright © 2015 Navextech. All Rights Reserved. Contact us |